Maze Challenge
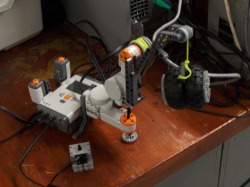
Prototype 1

For the maze challenge the goal was to travel a maze with only the robot in control. The design of the robot was one sonar sensor on the side and a touch sensor in the front. The two motors are to bring the robot forward. It took 2 days to finish building and my goal is to get it to travel the maze. But during the test the robots sensor kept interfering with the wall and stopping the robot. Some goals to fix the robot would be to bring the sonar sensor in more so it won’t interfere. Also the robot won't go straight which keeps it from making perfect turns. An idea to fix this would be to make one motor move faster then the other. So it would go straight instead of listing lazily to the left.
First Program
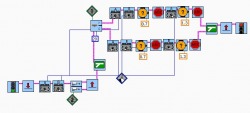
The first program was an goal for me. The tools i used for this challege where none like I've done before. The program works like this: the robot goes straight at power level 2. When the robot hits the wall with the touch sensor. It then reads wether theres a wall there or not using the sonar sensor. if it reads a wall then it goes backwards then turns right. If it doesnt see a wall then in goes back and turns left. the command then runs rpeatly.
final design

The improvments from Protoype to the final design wefre minor. the only improvement in the look of the robot was that we took off the sonar sensor. This was becuase the sonar senor kept hitting the wall and stopping the robot from turinging all the way. When we tested the robot it made it through the entire maze perfectly. It ended with a nice finish.
Final Program

The Final prgram was changed alot. I took out the sonar sensor so know the robot was programed with each turn indivisually. I tested each time how long it took to turn around each conor. I tested over and over agein until the prgram was finished.
| maze_vid.avi |
Maze Challenge Video
Echo Locator

the echo locator makes noises according to how far away it is, Just like a bat. The deisgn is just a sonar sensor and a nxt.

| 100_4241.mov |
Echo Locator Video
NXT-A-SKETCH

The NXT-A-SKETCH is works just like a etch-0-sketch. excpet the line is drawn through the rotation of the motors. The program was downloaded off legoEngineering .com and me and my partner built the robot through the step-by-step instructions. The only problem was that there was a mistake in the program that makes only one mottor actually work.
| 100_4308.mov |
NXT-A-SKETCH
The Voting Bouth

The Voting bouth does exactly what it sounds like. The voting bouth records information from the touch sensor and shows a number of how many times each sensor was clicked. While pluged in to the computer we could make a graph of the information over time, to produce a double line graph. Using the robot we could have a ballot and correctly record the votes directly on the computer.
The Crane With Rotatable joy stick
In this build me and my partner built the crane following the online directions. The crane is made up of two touch sensors, two nxt motors, and one rxt motor. The rxt motor is considered the joy stick. The crane carries two tires on a rope. This sybalizes a heavy weight that the crane has to carry. The design wasn't online. so i had to build it by the picture. but i ended up building a completely different thing. The following video shows how the robot works.
| 100_4381.mov |
The Crane
Rotaion counter

A simple but challenging robot, this robot counts the number of times the mottor completes a full turn, and after 7 turns the mottor shuts off. It records the time of each turn as well. The way that the robot figures out that the mottor makes a complete turn is with the light sensor. The light sensor Sees the black disk go past it and counts 1, 2, 3 continuing to 7 and when it reaches 7 the mottor stops.
| 100_4485.mov |
Rotations :D
Cup Mover

The Cup mover consist of two motors that power two non connected wheels. On the front of the robot there is a light sensor. The robot goes straight untill it sees a black line and then it stops goes back, turns a little, and goes straight. During the test we had some challenges first the back wheel was weak, it couldn't support the weight. I fixed this by using L connectors instead of the ones we had before. These L shape connectors worked alot better. Other that we were able to have it succesfully work by the secound try. There was no other problems we had to face.
The Program

The program starts with the robot going straight, and when the light sensor reads a value greater than 40, which would be dark, it stops and goes backwards. After 1 secound of going backwards it stops agein and turns on one mottor. With one mottor on it turns facing a new direction. The robot will then go straight, after 2 secounds of turing. This will continue forever, untill you turn off the program.
| 100_4575.mov |
Cup Mover Vid
Term 1-3
| robotics_0001.wmv |
