Robotics
Steep Ramp Chanlenge
Prototype 1

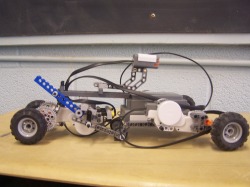
The basic design of the robot was two wheels and motors in the front and two wheels and one motor on the back. The front and back wheels are connected to big gear connected to really small gears which are attached to the motor. This big gear to small gear helps the wheel have more power which will give it the force needed to move up the steep ramp. When the robot was going up the ramp the furthest it went up the ramp was the 3rd level. Any level higher than that would make the robot fall backwards or the back wheels would break apart. Some problems that we had to face were that it wasn't stable; it was bouncing up and down. We figured that adding more weight in the front and adding support to all the wheels would help the robot go up the ramp without it falling apart.
Prototype 2

We rebuilt the front wheels and back wheels; we made it stronger, supporting, and heavier. We fixed the bouncing motion by replacing the back wheel gears with the same gears as the front. Also another improvement we made was we re-programmed the robot to go up the ramp backwards because there would be more weight for it to be stable on the ramp. When we tested the robot it made it up to the 4th level with no problems, but when we put it on the 5th level the robot fell backward like the previous test. For next work's improvements we will try to make it so the robot may be able to go up the ramp without falling backwards either by adding weight or making it flatter. Another idea would be to attach a grip around the ramp so it could give it more force to the ramp where the wheels can easily pull it up.
Prototype 3

For Prototype 3 we made many changes. We took off the arms on the robote and redesigned it so it was a lot flatter. This made the robot more closer to the ground so it wouldnt fall on its back like the previous tests. we added a arm in front of the robot that went around the ramp. On the arms there are wheels that will decreases the friction preventing the robot to go up the ramp. With adding alot of support we tired out the robot on the ramp. The robot made it up the entire ramp at its steepest level. It had no problems and just took off and scaled the 60 degrees angle ramp. Watch the vidoe below to see the robot in action.
| design_challenge_1.wmv |
Steep Ramp Challenge
Speed-bot challenge
prototype 1

Our first prototype was designed for speed. We have 3 motors on the robot and each motor powers a small gear and each small gear powers a big gears for maximum speed. On top of the robot their is a a touch sensor were we can start the robot to go forward. The robots maximum speed was 3.77 miles per hour. we found our speed by timing the robot in secounds how fast it traveled in 20ft
Prototype 2

For prototype 2 we made more improvements our goal was to make it sterder and faster. Some improvments we made were that we added wheels in the middle that supported it from bending. Also we took out alot of the unneeded support in the middle and added a long peice in the middle that connected the back and front wheels. when we tested on the 20ft track we timed 3.73 and the speed in miles per hour was 3.66
Finding the Speed of the Robot

to find the speed of the robot we tested the robot on a 20 foot track and timed it. Our result time was 3.77 s. Using dimensional analysis, we concurred that it is equivalent to 3.62 miles per hour
Protoype 3
For protype 3 we made many improvments. Some improvments that we made is that we turned the front wheels facing out instead of facing in. this gave the robot a wider grip on the floor. secoundly we added support on the back wheel so the back wheel could be kept in its place not lose like before. Lastly we took out the wore for the voice sensor and reattached it so it wouldn't be draging acorss the grown slowing it down. during the test it took our robot to travel the distance in 3.59 secounds. we converted this to 3.8 miles per hour. compared to the first test that went 3.62 miles per hour the speed is a big difference.
| 100_3591.mov |
Speed-bot Race
Going the Distance
Robot

For design challene3 we had to test the robot and find out how far it went during 2,5,8 sec. on power level 3 and 2,5,8, sec. on power level 5. Our tests results are shown on the following graphs.


The Program
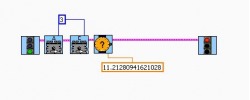
This is the prgram we used during the video. our goal was 93 inches and we figured that out by using the equation 93=7.8333x+5.1667. we simplified this to x=11.21280941621028 so we pluged this in the robots wait time so it can travel the distance of 93 inches.
| 100_3708.mov |
